Il generale Mikhail Diterichs Cavaliere Bianco della Monarchia Russa
Mikhail Konstantinovich Diterikhs Mikhail Konstantinovich Diterikhs (17/04/1874-9/10/1937), generale e pubblico russo...
Il controller di potenza digitale per un motore CA trifase è realizzato utilizzando uno speciale chip MC3PHAC di NXP Semiconductor. Genera 6 segnali PWM per un motore CA trifase. L'unità può essere facilmente combinata con un potente azionamento a chiave IGBT/MOSFET trifase. La scheda fornisce 6 segnali PWM per l'inverter IPM o IGBT, oltre a un segnale di freno. Il circuito funziona offline e non richiede programmazione o codifica.

M/s MC3PHAC è un controller intelligente monolitico progettato specificamente per soddisfare l'esigenza di sistemi di controllo di motori CA trifase a velocità variabile a basso costo. Il dispositivo si adatta e si configura in base ai suoi parametri. Contiene tutte le funzioni attive necessarie per implementare la parte ad anello aperto del controllo. Ciò rende l'MC3PHAC ideale per le applicazioni che richiedono il supporto del controllo del motore CA.

L'MC3PHAC include funzioni di protezione costituite dal monitoraggio della tensione del bus CC e dall'ingresso di guasto del sistema, che disabiliterà immediatamente il modulo PWM quando viene rilevato un guasto del sistema.
Tutti i segnali di uscita sono di livello TTL. L'ingresso per l'alimentazione è 5-15 V CC, la tensione costante sul bus deve essere compresa tra 1,75 e 4,75 volt, sulla scheda è previsto un interruttore DIP per l'installazione con motori con una frequenza di 60 o 50 Hz, i ponticelli aiutano a impostare la polarità del segnale PWM di uscita, ovvero attivo basso o attivo alto, che consente di utilizzare questa scheda in qualsiasi modulo, poiché l'uscita può essere impostata su attivo basso o alto. Il potenziometro PR2 aiuta a regolare la velocità del motore. Per modificare la frequenza di base, il tempo di spegnimento PWM e altri possibili parametri, studia la scheda tecnica. File del consiglio - archiviati

Controllo della velocità. La frequenza sincrona del motore elettrico può essere impostata in tempo reale su qualsiasi valore compreso tra 1 Hz e 128 Hz regolando il potenziometro PR2. Il fattore di scala è 25,6 Hz per volt. Elaborato con un filtro digitale a 24 bit per aumentare la stabilità della velocità.
Controllo dell'accelerazione. L'accelerazione del motore può essere impostata in tempo reale nell'intervallo da 0,5 Hz/sec a 128 Hz/sec regolando il potenziometro PR1. Il fattore di scala è 25,6 Hz/secondo per volt.
Protezione. Quando si verifica un guasto, l'MC3PHAC disabilita immediatamente il PWM e attende finché la condizione di guasto non viene eliminata prima di avviare un timer per riabilitarlo. In modalità standalone, questo intervallo di timeout viene impostato durante la fase di inizializzazione applicando tensione al pin MUX_IN mentre il pin RETRY_TxD è impostato su basso. Pertanto, è possibile specificare tempi di ripetizione da 1 a 60 secondi con un fattore di scala di 12 secondi per volt.
Monitoraggio dei guasti esterni. Il pin FAULTIN accetta un segnale digitale che indica un guasto rilevato da circuiti di monitoraggio esterni. Un livello alto su questo ingresso provoca la disattivazione immediata del PWM. Una volta che questo ingresso ritorna al livello logico basso, il timer del nuovo tentativo di errore inizia a funzionare e il PWM viene riabilitato dopo aver raggiunto il valore di timeout programmato. Il pin di ingresso 9 del connettore FLTIN CN3 deve essere ad alto potenziale.
Monitoraggio dell'integrità della tensione(pin 10 del segnale di ingresso in cn3) in DC_BUS è monitorato a 5,3 kHz (4,0 kHz se la frequenza PWM è impostata su 15,9 kHz). In modalità standalone, le soglie sono fissate a 4,47 volt (128% del valore nominale) e 1,75 volt (50% del valore nominale), dove il valore nominale è determinato a 3,5 volt. Non appena il livello del segnale DC_BUS ritorna ad un valore entro il limite consentito, il timer di ripetizione del guasto inizia a funzionare e il PWM viene riattivato dopo aver raggiunto il valore di timeout programmato.
Rigenerazione. Il processo di risparmio attraverso il quale l'energia meccanica immagazzinata nel motore e nel carico viene trasferita all'elettronica di azionamento avviene solitamente attraverso una decelerazione forzata. In casi speciali in cui questo processo si verifica frequentemente (ad esempio, sistemi di controllo del motore dell'ascensore), include funzioni speciali per consentire a questa energia di rifluire nella rete CA. Tuttavia, per la maggior parte degli azionamenti in CA a basso costo, questa energia viene immagazzinata nel condensatore del bus CC aumentandone la tensione. Se questo processo non è installato, la tensione del bus CC può raggiungere livelli pericolosi, che possono danneggiare il condensatore del bus o i transistor nell'inverter di potenza. MC3PHAC consente di automatizzare e stabilizzare questo processo.
Frenata resistiva. Il pin DC_BUS viene monitorato a 5,3 kHz (4,0 kHz se la frequenza PWM è impostata su 15,9 kHz) e quando la tensione raggiunge una determinata soglia, il pin RBRAKE diventerà alto. Questo segnale può essere utilizzato per controllare un freno a resistenza posizionato su un condensatore del bus CC in modo che l'energia meccanica proveniente dal motore venga dissipata sotto forma di calore nella resistenza. In modalità standalone, la soglia DC_BUS richiesta per riconoscere il segnale RBRAKE è fissata a 3,85 volt (110% del valore nominale), dove nominale è definito come 3,5 volt.

Selezione della frequenza PWM. L'MC3PHAC dispone di quattro frequenze di commutazione discrete che possono essere modificate dinamicamente durante la rotazione del motore. Questo resistore può essere un potenziometro o un resistore fisso nell'intervallo indicato nella tabella. La frequenza PWM viene determinata applicando tensione al pin MUX_IN mentre il pin PWM FREQ_RxD è pilotato a basso potenziale.
Discuti l'articolo REGOLATORE DI POTENZA PER MOTORE TRIFASE
Un regolatore così semplice, ma allo stesso tempo molto efficace può essere assemblato da quasi chiunque possa tenere in mano un saldatore e leggere anche leggermente gli schemi. Bene, questo sito ti aiuterà a soddisfare il tuo desiderio. Il regolatore presentato regola la potenza in modo molto fluido senza picchi o cali.











I motori asincroni CA sono i motori elettrici più utilizzati in assoluto in tutti i settori economici. I loro vantaggi includono la semplicità strutturale e il prezzo basso. In questo caso, la regolazione della velocità di un motore asincrono non ha poca importanza. I metodi esistenti sono mostrati di seguito.
Secondo lo schema a blocchi la velocità del motore elettrico può essere controllata in due direzioni, cioè variando le grandezze:
La prima opzione di correzione, utilizzata per i modelli con rotore a gabbia di scoiattolo, si effettua modificando:
La seconda opzione, utilizzata per la modifica con rotore avvolto, si basa su:
Grazie allo sviluppo della tecnologia di conversione della potenza, attualmente vengono prodotti su larga scala tutti i tipi di convertitori di frequenza, il che ha determinato l'uso attivo dei convertitori di frequenza. Diamo un'occhiata ai metodi più comuni.
Solo dieci anni fa nella catena di vendita al dettaglio esisteva un numero limitato di regolatori di velocità ED. La ragione di ciò era che non erano ancora stati prodotti transistor e moduli di potenza ad alta tensione economici.
Oggi la conversione di frequenza è il metodo più comune per regolare la velocità dei motori. I convertitori di frequenza trifase sono creati per controllare motori elettrici trifase.

I motori monofase sono controllati:
Per i motori utilizzati per l'uso quotidiano, puoi facilmente eseguire i calcoli necessari e assemblare il dispositivo su un chip semiconduttore con le tue mani. Di seguito è mostrato un esempio di circuito del controller del motore. Questo schema consente di controllare i parametri del sistema di azionamento, mantenere i costi di manutenzione e ridurre della metà il consumo di elettricità.

Lo schema del regolatore di velocità di rotazione EM per le esigenze quotidiane è notevolmente semplificato se viene utilizzato il cosiddetto triac.

La velocità di rotazione del motore è regolata tramite un potenziometro che determina la fase del segnale di impulso in ingresso che apre il triac. L'immagine mostra che due tiristori collegati in parallelo back-to-back vengono utilizzati come interruttori. Il regolatore di velocità a tiristori ED da 220 V viene spesso utilizzato per regolare carichi come dimmer, ventilatori e apparecchiature di riscaldamento. Gli indicatori tecnici e l'efficienza operativa dell'attrezzatura di propulsione dipendono dalla velocità di rotazione del motore asincrono.
Mikhail Konstantinovich Diterikhs Mikhail Konstantinovich Diterikhs (17/04/1874-9/10/1937), generale e pubblico russo...

I fagiolini sono sempre più utilizzati in cucina ogni anno. Si sposa bene con altre verdure. Raccogliere...

Data di pubblicazione: 18/11/18 Le mele sono il frutto più popolare e disponibile quasi tutto l'anno. Le mele sono tradizionali...

Nel 2017, il paese ha registrato un calo demografico. Circa la metà dei decessi sono dovuti a cause cardiovascolari...

SUL. Matsepuro, avvocato Istruzioni per la restituzione delle imposte pagate in eccesso La procedura per la compensazione e la restituzione delle imposte pagate in eccesso...

Circa quarant'anni fa, a San Pietroburgo, sull'isola Vasilievskij, viveva il proprietario di una pensione per uomini. Tra i trenta...

"Metteremo comunque Berezovsky in prigione" quando il suo "tetto del Cremlino" verrà staccato dal tribunale militare della guarnigione di Mosca in...

Se hai sognato dei passi in un sogno, un sogno del genere significa che un evento importante ti aspetta in...

Vuoi preparare anche tu per le feste un'insalata con pesce rosso particolarmente deliziosa? È sempre bellissimo, quindi...

Quando ho iniziato a pensare di andare in Moldavia e ne ho parlato alla mia famiglia, hanno subito iniziato a parlare con...

Fare il gelato in casa è difficile e semplice. È difficile perché è difficile organizzarsi...

Questa ragazza curiosa e talentuosa nacque nel 1899 in una grande famiglia ebrea, i Khazin, che adottò...
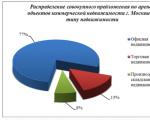
La società RRG ha presentato i risultati di uno studio sul mercato degli immobili commerciali per il 2017. Principali conclusioni,...
Irving Penn () è nato nel New Jersey negli Stati Uniti il 16 giugno 1917. Fin dalla prima infanzia si interessò molto...

I fagiolini sono sempre più utilizzati in cucina ogni anno. Si sposa bene con altre verdure...

Data di pubblicazione: 18/11/18 Le mele sono il frutto più popolare e disponibile quasi tutto l'anno. Mele...