Il generale Mikhail Diterichs Cavaliere Bianco della Monarchia Russa
Mikhail Konstantinovich Diterikhs Mikhail Konstantinovich Diterikhs (17/04/1874-9/10/1937), generale e pubblico russo...
Proprietà:
cos2α + cos2β + cos2γ = 1
b) definizione di operazioni lineari
la somma di due vettori non collineari è il vettore proveniente dall'origine comune dei vettori lungo la diagonale di un parallelogramma costruito su questi vettori

La differenza vettoriale è la somma di un vettore e di un vettore opposto al vettore: ![]() . Colleghiamo gli inizi dei vettori e , quindi il vettore è diretto dalla fine del vettore alla fine del vettore.
. Colleghiamo gli inizi dei vettori e , quindi il vettore è diretto dalla fine del vettore alla fine del vettore. 
Il lavoro un vettore in base a un numero è chiamato vettore con modulo , e at e at . Dal punto di vista geometrico, la moltiplicazione per un numero significa “allungare” il vettore di un fattore, mantenendo la direzione in e cambiando nella direzione opposta in .
Dalle regole di cui sopra per aggiungere vettori e moltiplicarli per un numero, seguono ovvie affermazioni:
1. ![]() (l'addizione è commutativa);
(l'addizione è commutativa);
2. ![]() (l'addizione è associativa);
(l'addizione è associativa);
3. ![]() (esistenza di un vettore nullo);
(esistenza di un vettore nullo);
4. ![]() (esistenza di un vettore opposto);
(esistenza di un vettore opposto);
5. ![]() (l'addizione è associativa);
(l'addizione è associativa);
6. (la moltiplicazione per un numero è distributiva);
7. ![]() (l'addizione vettoriale è distributiva);
(l'addizione vettoriale è distributiva);
c) prodotto scalare e sue proprietà fondamentali
Prodotto scalare due vettori diversi da zero si chiama numero uguale al prodotto le lunghezze di questi vettori per il coseno dell'angolo compreso tra loro. Se almeno uno dei due vettori è zero, allora l'angolo compreso tra loro non è definito e il prodotto scalare è considerato uguale a zero. Il prodotto scalare di vettori e è indicato con
 , dove e sono le lunghezze dei vettori e , rispettivamente, e è l'angolo tra i vettori e .
, dove e sono le lunghezze dei vettori e , rispettivamente, e è l'angolo tra i vettori e .
Il prodotto scalare di un vettore con se stesso è detto quadrato scalare.
Proprietà del prodotto scalare.
Per qualsiasi vettore vale quanto segue: proprietà del prodotto scalare:
la proprietà commutativa di un prodotto scalare;
proprietà distributiva  O
O  ;
;
proprietà associativa  O
O  , dove è un numero reale arbitrario;
, dove è un numero reale arbitrario;
il quadrato scalare di un vettore è sempre non negativo se e solo se il vettore è zero.
G) prodotto vettoriale e le sue proprietà
prodotto vettoriale dal vettore a al vettore b è chiamato vettore c, la cui lunghezza è numericamente uguale all'area del parallelogramma costruito sui vettori a e b, perpendicolare al piano di questi vettori e diretto in modo tale che la più piccola rotazione da a a b attorno al vettore c è in senso antiorario se visto dal vettore finale c
Formule per il calcolo del prodotto vettoriale di vettori
Grafica vettoriale due vettori a = (a x; a y; a z) e b = (b x; b y; b z) nel sistema di coordinate cartesiane è un vettore il cui valore può essere calcolato utilizzando le seguenti formule:
Equazione di una retta su un piano
A) Equazione di una retta con coefficiente angolare
Pendenza di una rettaè chiamata tangente dell'angolo di inclinazione di questa linea.
La pendenza di una linea retta è solitamente indicata con la lettera K. Quindi per definizione.
Se la retta è parallela all'asse delle ordinate, allora pendenza non esiste (in questo caso dicono anche che la pendenza va all'infinito).
Una pendenza positiva di una linea indica un aumento nel grafico della funzione, una pendenza negativa indica una diminuzione. L'equazione di una linea retta con coefficiente angolare ha la forma y=kx+b, dove k è il coefficiente angolare della linea, b è un numero reale. Utilizzando l'equazione di una retta con coefficiente angolare, è possibile specificare qualsiasi retta che non sia parallela all'asse Oy (per una retta parallela all'asse delle ordinate, il coefficiente angolare non è definito).
B) tipi di equazioni di una retta
L'equazione ![]() chiamato equazione generale della retta in superficie.
chiamato equazione generale della retta in superficie.
Qualsiasi equazione di primo grado con due variabili X E sì Tipo ![]() , Dove UN, IN E CON- Alcuni numeri reali, E UN E IN non sono uguali a zero allo stesso tempo, definisce una linea retta in un sistema di coordinate rettangolari Ossi sul piano, e ogni linea sul piano è data da un'equazione della forma
, Dove UN, IN E CON- Alcuni numeri reali, E UN E IN non sono uguali a zero allo stesso tempo, definisce una linea retta in un sistema di coordinate rettangolari Ossi sul piano, e ogni linea sul piano è data da un'equazione della forma ![]() .
.
Equazione della linea della forma , dove UN E B– vengono chiamati alcuni numeri reali diversi da zero Equazione di una retta in segmenti. Questo nome non è casuale, poiché i valori assoluti dei numeri UN E B pari alla lunghezza dei segmenti che la retta taglia sugli assi coordinati Bue E Ehi rispettivamente (i segmenti vengono contati dall'origine).
Equazione della linea della forma , dove X E sì- variabili e K E B– vengono chiamati alcuni numeri reali Equazione di una retta inclinata (K- pendenza)
Equazione canonica di una retta su un piano in un sistema di coordinate cartesiane rettangolari Ossi sembra  , dove e sono alcuni numeri reali e allo stesso tempo non sono uguali a zero.
, dove e sono alcuni numeri reali e allo stesso tempo non sono uguali a zero.
Ovviamente per il punto passa la retta definita dall'equazione canonica della retta. A loro volta, i numeri e nei denominatori delle frazioni rappresentano le coordinate del vettore di direzione di questa linea. Quindi, l'equazione canonica della retta in un sistema di coordinate rettangolari Ossi sul piano corrisponde ad una retta passante per un punto e avente un vettore direzione .
Equazioni parametriche di una retta su un piano assomigliare  , dove e sono alcuni numeri reali, e allo stesso tempo non sono uguali a zero, ed è un parametro che assume qualsiasi valore reale.
, dove e sono alcuni numeri reali, e allo stesso tempo non sono uguali a zero, ed è un parametro che assume qualsiasi valore reale.
Le equazioni parametriche di linea stabiliscono una relazione implicita tra le ascisse e le ordinate dei punti su una linea retta utilizzando un parametro (da cui il nome di questo tipo di equazione di linea).
Una coppia di numeri calcolati dalle equazioni parametriche di una linea per un valore reale del parametro rappresenta le coordinate di un certo punto sulla linea. Ad esempio, quando abbiamo  , cioè il punto con coordinate giace su una linea retta.
, cioè il punto con coordinate giace su una linea retta.
Va notato che i coefficienti e per il parametro in equazioni parametriche linea sono le coordinate del vettore direzione di questa linea
Equazione di una retta passante per due punti
Siano dati nello spazio due punti M 1 (x 1, y 1, z 1) e M 2 (x 2, y 2, z 2), quindi l'equazione della retta passante per questi punti è:

Se uno qualsiasi dei denominatori uguale a zero, il numeratore corrispondente va posto uguale a zero Sul piano l'equazione della retta scritta sopra è semplificata:

se x 1 ≠ x 2 e x = x 1, se x 1 = x 2.
Si chiama la frazione = k pendenza Dritto.
C) calcolo dell'angolo formato da due rette
se sono date due linee y = k 1 x + b 1 , y = k 2 x + b 2, allora angolo acuto tra queste linee rette sarà definito come
 .
.
Due rette sono parallele se k 1 = k 2. Due rette sono perpendicolari se k 1 = -1/ k 2.
Teorema. Le rette Ax + Bу + C = 0 e A 1 x + B 1 y + C 1 = 0 sono parallele quando i coefficienti A 1 = λA, B 1 = λB sono proporzionali. Se anche C 1 = λC, allora le rette coincidono. Le coordinate del punto di intersezione di due linee si trovano come soluzione al sistema di equazioni di queste linee.
D) condizioni di parallelismo e perpendicolarità di due rette
Condizioni per il parallelismo di due rette:
a) Se le rette sono date da equazioni con coefficiente angolare, allora la condizione necessaria e sufficiente per il loro parallelismo è l'uguaglianza dei loro coefficienti angolari:
K 1 = K 2 .
b) Per il caso in cui le linee sono date dalle equazioni in vista generale(6), una condizione necessaria e sufficiente per il loro parallelismo è che i coefficienti per le corrispondenti coordinate correnti nelle loro equazioni siano proporzionali, cioè
Condizioni per la perpendicolarità di due rette:
a) Nel caso in cui le linee siano date dalle equazioni (4) con un coefficiente angolare, condizione necessaria e sufficiente per la loro perpendicolarità è che i loro coefficienti angolari siano inversi in grandezza e opposti in segno, cioè
Questa condizione può anche essere scritta nella forma
K 1 K 2 = -1.
b) Se le equazioni delle rette sono date nella forma generale (6), allora la condizione per la loro perpendicolarità (necessaria e sufficiente) è soddisfare l'uguaglianza
UN 1 UN 2 + B 1 B 2 = 0.
Limite di funzione
A) limite di sequenza
Il concetto di limite fu utilizzato da Newton nella seconda metà del XVII secolo e da matematici del XVIII secolo come Eulero e Lagrange, ma essi capirono il limite in modo intuitivo. Le prime definizioni rigorose del limite di successione furono date da Bolzano nel 1816 e da Cauchy nel 1821.
Il numero viene chiamato limite della sequenza numerica, se la successione è infinitesima, cioè tutti i suoi elementi, a partire da uno, sono inferiori in valore assoluto a qualsiasi numero positivo predeterminato.
Se una sequenza numerica ha un limite sotto forma di numero reale, viene chiamata convergente a questo numero. Altrimenti, viene chiamata la sequenza divergente . Se inoltre è illimitato, allora si assume che il suo limite sia uguale all'infinito.
Inoltre, se tutti gli elementi di una successione illimitata, a partire da un certo numero, hanno segno positivo, allora il limite di tale successione si dice che è più infinito .
Se gli elementi di una successione illimitata, a partire da un certo numero, hanno segno negativo, allora dicono che il limite di tale successione è uguale a meno infinito .
B) limite della funzione
Limite di funzione (valore limite della funzione) in un dato punto, limitando il dominio di definizione di una funzione, è il valore al quale tende il valore della funzione considerata man mano che il suo argomento tende ad un dato punto.
Limite di funzioneè una generalizzazione del concetto di limite di una sequenza: inizialmente per limite di una funzione in un punto si intendeva il limite di una sequenza di elementi del dominio dei valori di una funzione composta da immagini di punti di una sequenza di elementi del dominio di definizione di una funzione convergente ad un dato punto (il limite al quale viene considerato); se tale limite esiste, allora si dice che la funzione converge al valore specificato; se tale limite non esiste, allora la funzione si dice divergente.
Limite di funzione- uno dei concetti base dell'analisi matematica. Il valore viene chiamato limite (valore limite) di una funzione in un punto se per qualsiasi sequenza di punti convergenti ma non contenenti uno dei suoi elementi (cioè in un intorno perforato), la sequenza di valori della funzione converge a .
Il valore viene chiamato limite (valore limite) funziona nel punto se per ogni numero positivo preso in anticipo esiste un numero positivo corrispondente tale che per tutti gli argomenti che soddisfano la condizione la disuguaglianza è soddisfatta.
C) due limiti notevoli
· Il primo limite notevole:
![]()
Conseguenze
· ![]()
· ![]()
· 
· Il secondo limite notevole:
![]()
Conseguenze
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]() Per ,
Per ,
6. ![]()
D) Funzioni infinitesime e infinitamente grandi
Funzione y=f(x) chiamato infinitesimale A x→a o quando X→∞, se o , cioè una funzione infinitesima è una funzione il cui limite in un dato punto è zero.
se funzione y=f(x) rappresentabile con x→a come somma di un numero costante B e grandezza infinitesimale α(x): f(x)=b+ α(x) Quello .
Viceversa, se , allora f(x)=b+α(x), Dove ascia)– infinitesimo a x→a.
Corollario 1. Se e, allora.
Corollario 2. Se c= const, quindi .
Se la funzione f(x)è infinitamente grande a x→a, quindi funzione 1 /f(x)è infinitesimale a x→a.
Se la funzione f(x)- infinitesimo a x→a(O x→∞) e non svanisce, quindi y= 1/f(x)è una funzione infinitamente grande. Le proprietà più semplici delle funzioni infinitamente piccole e infinitamente grandi possono essere scritte utilizzando le seguenti relazioni condizionali: UN≠ 0
D) comunicazione delle incertezze. La regola dell'Hopital
principali tipologie di incertezze: zero diviso zero ( da 0 a 0), infinito diviso per infinito, zero moltiplicato per infinito, infinito meno infinito, uno alla potenza dell'infinito, zero alla potenza di zero, infinito alla potenza di zero.

La regola dell'Hopital molto utilizzato per calcoli limite quando c'è un'incertezza della forma zero diviso zero, infinito diviso infinito.
Questi tipi di incertezze includono le incertezze zero volte infinito e infinito meno infinito.
Se e se funziona f(x) E g(x) sono differenziabili in un intorno del punto , allora 
Nel caso in cui l'incertezza non scompaia dopo l'applicazione della regola di L'Hopital, è possibile applicarla nuovamente.
Calcolo dei derivati
A) regola di differenziazione funzione complessa
Lascia fare funzione complessa , dove funzione è un argomento intermedio. Mostreremo come trovare la derivata di una funzione complessa, conoscendo la derivata della funzione (la denoteremo con) e la derivata della funzione.
Teorema 1. Se una funzione ha una derivata in un punto X, e la funzione ha una derivata nel punto (), quindi la funzione complessa nel punto X ha una derivata e = .
Altrimenti la derivata di una funzione complessa è uguale al prodotto della derivata della funzione data rispetto all'argomento intermedio e alla derivata dell'argomento intermedio.
B) differenziazione di una funzione specificata parametricamente
Sia data la funzione in forma parametrica, cioè nella forma:
dove le funzioni e sono definite e continue per un certo intervallo di variazione del parametro . Troviamo i differenziali dei lati destro e sinistro di ciascuna delle uguaglianze:
Per trovare la derivata seconda effettuiamo le seguenti trasformazioni:
![]()
B) il concetto di derivata logaritmica di una funzione
La derivata logaritmica di una funzione positiva si chiama derivata. Poiché , allora secondo la regola di differenziazione di una funzione complessa otteniamo la seguente relazione per la derivata logaritmica:
 .
.
Utilizzando la derivata logaritmica è conveniente calcolare la derivata ordinaria nei casi in cui il logaritmo semplifica la forma della funzione.
L'essenza di questa differenziazione è la seguente: innanzitutto, trova il logaritmo data funzione, e solo allora viene calcolata la derivata da esso. Si dia una certa funzione. Prendiamo i logaritmi dei lati sinistro e destro di questa espressione:
E quindi, esprimendo la derivata desiderata, il risultato è:
D) derivata della funzione inversa
Se y=f(x) e x=g(y) sono una coppia di funzioni reciprocamente inverse, e la funzione y=f(x) ha una derivata f"(x), allora la derivata della funzione inversa g"( x)=1/f" (x).
Pertanto, le derivate di funzioni reciprocamente inverse sono quantità reciproche. Formula per la derivata della funzione inversa:
D) derivato funzione implicita
Se una funzione di una variabile è descritta dall'equazione sì=F(X), dove la variabile sìè sul lato sinistro e il lato destro dipende solo dall'argomento X, allora dicono che la funzione è data esplicitamente. Ad esempio, le seguenti funzioni sono specificate esplicitamente:
sì= peccato X,sì=X 2+2X+5,sì=lncos X.
In molti problemi, tuttavia, la funzione può essere specificata implicitamente, cioè. come un'equazione
F(X,sì)=0.
per trovare la derivata sì′( X) una funzione specificata implicitamente non necessita di essere convertita in una forma esplicita. Per fare questo, conoscendo l'equazione F(X,sì)=0, basta fare quanto segue:
Per prima cosa devi differenziare entrambi i lati dell'equazione rispetto alla variabile X, supponendo che sì− è una funzione differenziabile X e utilizzare la regola per calcolare la derivata di una funzione complessa. In questo caso anche la derivata di zero (a destra) sarà uguale a zero.
Commento: Se il lato destro è diverso da zero, ad es. l'equazione implicita è
F(X,sì)=G(X,sì),
quindi differenziamo i lati sinistro e destro dell'equazione.
Risolvi l'equazione risultante per la derivata sì′( X).
Concetto di derivata
A) definizione di derivato
Derivata di una funzione differenziazione integrazione.
sì XX
Definizione di derivato
Considera la funzione F(X X 0. Quindi la funzione F(X) È differenziabile al punto X 0, e lei derivatoè determinato dalla formula
F′( X 0)=limΔ X→0Δ sìΔ X=limΔ X→0F(X 0+Δ X)−F(X 0)Δ X.
Derivata di una funzioneè uno dei concetti base della matematica, e in analisi matematica la derivata, insieme all'integrale, occupa un posto centrale. Il processo per trovare la derivata si chiama differenziazione. Viene chiamata l'operazione inversa, ovvero ripristinare una funzione da una derivata nota integrazione.
La derivata di una funzione ad un certo punto caratterizza la velocità di variazione della funzione in quel punto. Una stima del tasso di variazione può essere ottenuta calcolando il rapporto tra la variazione della funzione Δ sì ad un corrispondente cambiamento nell'argomento Δ X. Nella definizione della derivata tale relazione viene considerata al limite sotto la condizione Δ X→0. Passiamo ad una formulazione più rigorosa:
Definizione di derivato
Considera la funzione F(X), il cui dominio contiene un intervallo aperto attorno al punto X 0. Quindi la funzione F(X) È differenziabile al punto X 0, e lei derivatoè determinato dalla formula
F′( X 0)=limΔ X→0Δ sìΔ X=limΔ X→0F(X 0+Δ X)−F(X 0)Δ X.
B) significato geometrico della derivata
La derivata della funzione, calcolata per un dato valore, è uguale alla tangente dell'angolo formato dalla direzione positiva dell'asse e dalla direzione positiva della tangente disegnata al grafico di questa funzione nel punto con l'ascissa:
Se una funzione ha una derivata finita in un punto, allora nelle vicinanze può essere approssimata da una funzione lineare
La funzione si chiama tangente a nel punto Numero.
D) tavola delle derivate delle funzioni elementari più semplici

Lascia che il vettore ( X , A , z ).
Indichiamo gli angoli di inclinazione di questo vettore rispetto agli assi Oh, oh E Oz lettere di conseguenza ,E. Tre numeri cos, cos E cos solitamente chiamato coseni direzionali del vettore. Credere = (1; 0; 0 ) otteniamo da (9)
Allo stesso modo

Dalle formule (11) - (13) segue:
1) cos 2 +cos 2 +cos 2 = 1 ,
quelli. la somma dei quadrati dei coseni direzionali di qualsiasi vettore diverso da zero è uguale a uno;
![]()
quelli.i coseni direzionali di questo vettore sono proporzionali alle sue proiezioni corrispondenti.
Nota. Dalle formule (11)-(13) è chiaro che le proiezioni di qualsiasi vettore unitario sugli assi coordinati coincidono rispettivamente con i suoi coseni di direzione e, quindi,
Esempio. Trovare i coseni direzionali di un vettore (1; 2; 2). Secondo le formule (11)-(13) abbiamo

Definizione. Il prodotto vettoriale di due vettoriEè chiamato un nuovo vettore il cui modulo uguale all'area un parallelogramma costruito su vettori e ridotto ad un'origine comune, e che è perpendicolare ai vettori moltiplicati (in altre parole, perpendicolare al piano del parallelogramma costruito su di essi) e diretto in una direzione tale che la rotazione più breve attorno al risultante il vettore sembra avvenire in senso antiorario se visto dal vettore finale (Fig. 40).

Se i vettori sono collineari, il loro prodotto vettoriale è considerato uguale al vettore zero. Da questa definizione ne consegue che
|| = || || peccato,
dov'è l'angolo tra i vettori( 0 ). Il prodotto vettoriale dei vettori ed è indicato dal simbolo
xoo[,].
Scopriamo il significato fisico del prodotto vettoriale. Se un vettore rappresenta applicato ad un certo punto SM limo e il vettore proviene da un certo punto DI esattamente M, poi il vettore = rappresenta il momento della forza attorno ad un punto DI.
Proprietà di un prodotto incrociato
1 . Quando si riorganizzano i fattori, il prodotto vettoriale cambia segno, cioè
x = -(x).
()x=x()=(x), dove è uno scalare.
3. Il prodotto vettoriale obbedisce alla legge di distribuzione, cioè
4. Se il prodotto vettoriale di due vettori è uguale al vettore zero, allora almeno uno dei vettori moltiplicati è uguale al vettore zero (caso banale), oppure il seno dell'angolo tra loro è uguale a zero, cioè i vettori sono collineari.
Indietro, se due vettori diversi da zero sono collineari, il loro prodotto vettoriale è uguale al vettore zero.
Così , Affinché due vettori diversi da zero siano collineari è necessario e sufficiente che il loro prodotto vettoriale sia uguale al vettore zero.
Da qui, in particolare, segue che il prodotto vettoriale di un vettore con se stesso è uguale al vettore nullo:
x =0
(X chiamato anche vettore quadrato vettoriale .
Siano dati tre vettori e. Immaginiamo che un vettore venga moltiplicato vettorialmente per un vettore e il vettore risultante venga moltiplicato scalarmente per un vettore, determinando così il numero (x). Si chiama o lavoro misto tre vettori e.
Per brevità, indicheremo il prodotto misto (x) o ().
Scopriamo il significato geometrico del prodotto misto. Siano i vettori considerati non complanari. Costruiamo un parallelepipedo su vettori e su spigoli.
Il prodotto vettoriale x è un vettore (=) numericamente uguale all'area del parallelogramma OADB (la base del parallelepipedo costruito), costruito su una vectorachia diretta perpendicolarmente al piano del parallelogramma (Fig. 41).
Il prodotto scalare (x) = è il prodotto del modulo del vettore e della proiezione del vettore (vedi paragrafo 1, (2)).
L'altezza del parallelepipedo costruito è il valore assoluto di questa proiezione.
Pertanto il prodotto | |in valore assoluto è pari al prodotto dell'area della base del parallelepipedo e della sua altezza, cioè il volume di un parallelepipedo costruito su vettori, e.

È importante notare che il prodotto scalare dà il volume del parallelepipedo, a volte con segno positivo, a volte con segno negativo. Si ottiene un segno positivo se l'angolo tra i vettori è acuto; negativo - se stupido. Con un angolo acuto tra e il vettore si trova sullo stesso lato del piano OADB , come vettore e, quindi, dalla fine del vettore, la rotazione da sarà visibile allo stesso modo della fine del vettore, cioè in senso positivo (antiorario).
Ad un angolo ottuso tra il vettore si trova sull'altro lato dell'aereo OADB rispetto al vettore, e quindi, dalla fine del vettore, la rotazione si vedrà in senso negativo (orario). In altre parole, il prodotto è positivo se i vettori e formano un sistema con lo stesso nome con il principale Oxyz (situati reciprocamente allo stesso modo degli assi Ox, Oy, Oz), ed è negativo se i vettori formano un sistema con lo stesso nome di quello principale.
Così, il prodotto misto è un numero,il cui valore assoluto esprime il volume del parallelepipedo,costruito su vettori,come sulle costole.
Il segno del prodotto è positivo se i vettori formano un sistema con lo stesso nome di quello principale, negativo altrimenti.
Ne consegue che il valore assoluto del prodotto =(x) rimarrà lo stesso, indipendentemente dall'ordine in cui prendiamo i fattori. Quanto al segno, in alcuni casi sarà positivo, in altri negativo; dipende se i nostri tre vettori, presi in un certo ordine, formano o meno un sistema con lo stesso nome di quello principale. Tieni presente che i nostri assi di coordinate sono disposti in modo tale da susseguirsi in senso antiorario guardando l'interno (Fig. 42). La sequenza non viene violata se iniziamo la traslazione dal secondo o dal terzo asse, purché venga eseguita nella stessa direzione, cioè Antiorario. In questo caso, i fattori vengono riorganizzati in modo circolare (ciclicamente). Otteniamo così la seguente proprietà:
Un prodotto misto non cambia con la riorganizzazione circolare (ciclica) dei suoi fattori. Riordinando due fattori adiacenti si cambia il segno del prodotto
= ==-()=-()=-().
Infine, da significato geometrico un prodotto misto è immediatamente seguito dalla seguente affermazione.
Condizione necessaria e sufficiente per la complanarità dei vettori,,è l'uguaglianza del loro prodotto misto a zero:
questi sono i coseni degli angoli che forma il vettore con i semiassi positivi delle coordinate. I coseni di direzione specificano in modo univoco la direzione del vettore. Se un vettore ha lunghezza 1, i suoi coseni direzionali sono uguali alle sue coordinate. In generale, per un vettore con coordinate ( UN; B; C) i coseni di direzione sono uguali:
dove a, b, g sono gli angoli formati dal vettore con gli assi X, sì, z rispettivamente.
21) Scomposizione di un vettore in vettori unitari. Il vettore unitario dell'asse delle coordinate è indicato con , gli assi con e gli assi con (Fig. 1).

Per ogni vettore che giace nel piano si verifica la seguente espansione:
Se il vettore ![]() situato nello spazio, allora lo sviluppo in versori degli assi coordinati ha la forma:
situato nello spazio, allora lo sviluppo in versori degli assi coordinati ha la forma:
22)Prodotto scalare due vettori diversi da zero e il numero pari al prodotto delle lunghezze di questi vettori e del coseno dell'angolo compreso tra loro si chiama:
23)Angolo tra due vettori
Se l'angolo tra due vettori è acuto, allora il loro prodotto scalare è positivo; se l'angolo tra i vettori è ottuso, il prodotto scalare di questi vettori è negativo. Il prodotto scalare di due vettori diversi da zero è uguale a zero se e solo se questi vettori sono ortogonali.
24) Condizione di parallelismo e perpendicolarità di due vettori.
Condizione affinché i vettori siano perpendicolari
I vettori sono perpendicolari se e solo se il loro prodotto scalare è zero Dati due vettori a(xa;ya) eb(xb;yb). Questi vettori saranno perpendicolari se l'espressione xaxb + yayb = 0.

25) Prodotto vettoriale di due vettori.
Il prodotto vettoriale di due vettori non collineari è un vettore c=a×b che soddisfa le seguenti condizioni: 1) |c|=|a| |b| sin(a^b) 2) c⊥a, c⊥b 3) I vettori a, b, c formano una tripletta di vettori a destra.
26) Vettori collineari e complanari..
I vettori sono collineari se l'ascissa del primo vettore sta all'ascissa del secondo come l'ordinata del primo sta all'ordinata del secondo UN (xa;sì) E B (xb;sì). Questi vettori sono collineari se xa = x b E sì, sì = sì b, Dove R.
Vettori −→ UN,−→B e −→ C sono chiamati Complanare, se esiste un piano al quale sono paralleli.
27) Prodotto misto di tre vettori. Prodotto misto di vettori- prodotto scalare del vettore a e prodotto vettoriale dei vettori b e c. Trova il prodotto misto dei vettori a = (1; 2; 3), b = (1; 1; 1), c = (1; 2; 1).
Soluzione:
1·1·1 + 1·1·2 + 1·2·3 - 1·1·3 - 1·1·2 - 1·1·2 = 1 + 2 + 6 - 3 - 2 - 2 = 2
28) La distanza tra due punti su un piano. La distanza tra due punti dati è uguale alla radice quadrata della somma delle differenze quadrate delle stesse coordinate di questi punti.
29) Divisione di un segmento in questa relazione. Se il punto M(x; y) giace su una linea che passa per due punti dati ( , ) e ( , ), e viene data una relazione in cui il punto M divide il segmento , allora le coordinate del punto M sono determinate dalle formule
Se il punto M è il punto medio del segmento, le sue coordinate sono determinate dalle formule
30-31. Pendenza di una rettaè chiamata tangente dell'angolo di inclinazione di questa linea. La pendenza di una linea retta è solitamente indicata con la lettera K. Quindi per definizione
Equazione di una retta inclinata ha la forma dove K- pendenza in linea retta, B– qualche numero reale. Utilizzando l'equazione di una linea retta con un coefficiente angolare, è possibile specificare qualsiasi linea retta che non sia parallela all'asse Ehi(per una retta parallela all'asse delle ordinate il coefficiente angolare non è definito).
33. Equazione generale della retta su un piano. Equazione della forma ![]() C'è equazione generale di una retta Ossi. A seconda dei valori costante A, B e C sono possibili i seguenti casi particolari:
C'è equazione generale di una retta Ossi. A seconda dei valori costante A, B e C sono possibili i seguenti casi particolari:
C = 0, A ≠0, B ≠ 0 – la retta passa per l'origine
A = 0, B ≠0, C ≠0 (By + C = 0) - retta parallela all'asse del Bue
B = 0, A ≠0, C ≠ 0 (Ax + C = 0) – retta parallela all'asse Oy
B = C = 0, A ≠0 – la retta coincide con l'asse Oy
A = C = 0, B ≠0 – la retta coincide con l'asse del Bue
34.Equazione di una retta in segmenti su un piano in un sistema di coordinate rettangolari Ossi ha la forma dove UN E B- alcuni numeri reali diversi da zero. Questo nome non è casuale, poiché i valori assoluti dei numeri UN E B pari alla lunghezza dei segmenti che la retta taglia sugli assi coordinati Bue E Ehi rispettivamente (i segmenti vengono contati dall'origine). Pertanto, l'equazione di una linea in segmenti facilita la costruzione di questa linea in un disegno. Per fare ciò, dovresti contrassegnare i punti con le coordinate e in un sistema di coordinate rettangolari sul piano e utilizzare un righello per collegarli con una linea retta.
35. L'equazione normale di una linea ha la forma
dov'è la distanza dalla retta all'origine; – l'angolo tra la normale alla linea e l'asse.
L'equazione normale può essere ottenuta dall'equazione generale (1) moltiplicandola per il fattore di normalizzazione, il segno è opposto al segno per cui .
I coseni degli angoli tra la retta e gli assi delle coordinate sono chiamati coseni direzionali, – l'angolo tra la retta e l'asse, – tra la retta e l'asse:
Pertanto, l'equazione normale può essere scritta nella forma
Distanza dal punto ad una linea retta determinato dalla formula 
36. La distanza tra un punto e una linea viene calcolata utilizzando la seguente formula: ![]()
dove x 0 e y 0 sono le coordinate del punto e A, B e C sono i coefficienti dell'equazione generale della retta
37. Riduzione dell'equazione generale di una linea alla normale. Un'equazione e un piano in questo contesto non differiscono l'uno dall'altro in nient'altro che nel numero di termini nelle equazioni e nella dimensione dello spazio. Pertanto, prima dirò tutto sull'aereo e alla fine farò una prenotazione sulla linea retta.
Sia data l'equazione generale del piano: Ax + By + Cz + D = 0.
;. otteniamo il sistema: g;Mc=cosb, MB=cosa Portiamolo alla forma normale. Per fare ciò, moltiplichiamo entrambi i lati dell'equazione per il fattore di normalizzazione M. Otteniamo: Max+Mvu+MCz+MD=0. In questo caso MA=cos;.g;Mc=cosb, MB=cosa otteniamo il sistema:
M2B2=cos2b
M2 C2=cos2g
Sommando tutte le equazioni del sistema si ottiene M*(A2 + B2 + C2) = 1 Ora non resta che esprimere M da qui per sapere per quale fattore di normalizzazione bisogna moltiplicare l'equazione generale originaria per portarla alla forma normale:
M=-+1/ROTALE KV A2 +B2 +C2
MD dovrebbe essere sempre presente meno di zero, quindi, il segno del numero M viene preso opposto al segno del numero D.
Con l'equazione di una linea retta, tutto è uguale, solo che dalla formula per M dovresti semplicemente rimuovere il termine C2.
| Ascia + Di + Cz + D = 0, |
38.Equazione generale del piano nello spazio è detta equazione della forma
Dove UN 2 + B 2 + C 2 ≠ 0 .
Nello spazio tridimensionale nel sistema di coordinate cartesiane, qualsiasi piano è descritto da un'equazione di 1° grado (equazione lineare). E viceversa, qualsiasi equazione lineare definisce un piano.
40.Equazione di un piano in segmenti. In un sistema di coordinate rettangolari Oxyz nello spazio tridimensionale un'equazione della forma  , Dove UN, B E C– vengono chiamati i numeri reali diversi da zero Equazione del piano in segmenti. Valori assoluti dei numeri UN, B E C pari alla lunghezza dei segmenti che il piano taglia sugli assi coordinati Bue, Ehi E Oz rispettivamente, contando dall'origine. Segno di numeri UN, B E C mostra in quale direzione (positiva o negativa) sono tracciati i segmenti sugli assi delle coordinate
, Dove UN, B E C– vengono chiamati i numeri reali diversi da zero Equazione del piano in segmenti. Valori assoluti dei numeri UN, B E C pari alla lunghezza dei segmenti che il piano taglia sugli assi coordinati Bue, Ehi E Oz rispettivamente, contando dall'origine. Segno di numeri UN, B E C mostra in quale direzione (positiva o negativa) sono tracciati i segmenti sugli assi delle coordinate
41) Equazione del piano normale.
L'equazione normale di un piano è la sua equazione scritta nella forma
dove , , sono i coseni direzionali della normale al piano, e
p è la distanza dall'origine al piano. Quando si calcola la direzione del coseno della normale, si deve presumere che sia diretta dall'origine al piano (se il piano passa per l'origine, la scelta della direzione positiva della normale è indifferente).
42) Distanza da un punto ad un piano.Sia il piano dato dall'equazione ![]() e viene assegnato un punto. Quindi la distanza dal punto al piano è determinata dalla formula
e viene assegnato un punto. Quindi la distanza dal punto al piano è determinata dalla formula
 |
Prova. La distanza da un punto a un piano è, per definizione, la lunghezza della perpendicolare tracciata dal punto al piano
Angolo tra i piani
Lasciamo che i piani e siano specificati dalle equazioni e , rispettivamente. Devi trovare l'angolo tra questi piani.
I piani, intersecandosi, formano quattro angoli diedri: due ottusi e due acuti o quattro retti, ed entrambi gli angoli ottusi sono uguali tra loro, ed entrambi gli angoli acuti sono anche uguali tra loro. Cercheremo sempre un angolo acuto. Per determinarne il valore, prendiamo un punto sulla linea di intersezione dei piani e in questo punto in ciascuno di
piani, disegniamo le perpendicolari alla linea di intersezione.
DEFINIZIONE
Vettoreè chiamata coppia ordinata di punti e (cioè si sa esattamente quale dei punti di questa coppia è il primo).
Il primo punto è chiamato inizio del vettore, e il secondo è suo fine.
Si chiama la distanza tra l'inizio e la fine di un vettore lunghezza O modulo vettoriale.
Viene chiamato un vettore il cui inizio e fine coincidono zero ed è indicato con ; la sua lunghezza è considerata pari a zero. Altrimenti, se la lunghezza del vettore è positiva, viene chiamato diverso da zero.
Commento. Se la lunghezza di un vettore è uguale a uno, viene chiamato ortom O vettore unitario ed è designato .
ESEMPIO
| Esercizio | Controlla se c'è un vettore  separare. separare. |
| Soluzione | Calcoliamo la lunghezza di un dato vettore, è uguale alla radice quadrata della somma dei quadrati delle coordinate: Poiché la lunghezza del vettore è uguale a uno, significa che il vettore è un orto. |
| Risposta | Vettore unitario. |
Un vettore diverso da zero può anche essere definito come un segmento orientato.
Commento. La direzione del vettore zero non è definita.
DEFINIZIONE
Coseni direzionali di un certo vettore si chiamano coseni degli angoli che il vettore forma con le direzioni positive degli assi coordinati.
Commento. La direzione di un vettore è determinata unicamente dai suoi coseni direzionali.
Per trovare i coseni direzionali di un vettore, è necessario normalizzare il vettore (cioè dividere il vettore per la sua lunghezza):
Commento. Le coordinate di un vettore unitario sono uguali ai suoi coseni di direzione.
TEOREMA
(Proprietà dei coseni direzionali). La somma dei quadrati dei coseni direzionali è uguale a uno:
La somma dei quadrati dei coseni direzionali è uguale a uno.
Se i coseni di direzione del vettore sono noti, le sue coordinate possono essere trovate utilizzando le formule: Formule simili si applicano nel caso tridimensionale - se i coseni di direzione del vettore sono noti, le sue coordinate possono essere trovate utilizzando le formule:
9 Dipendenza lineare e indipendenza lineare vettori. Basi sull'aereo e nello spazio
L'insieme dei vettori viene chiamato sistema di vettori.
linearmente dipendente, se ci sono numeri che non sono tutti uguali a zero allo stesso tempo, quello
Viene chiamato un sistema di vettori linearmente indipendente, se l'uguaglianza è possibile solo per , cioè Quando combinazione lineare sul lato sinistro l'uguaglianza è banale.
1. Un vettore forma anche un sistema: at - linearmente dipendente e at - linearmente indipendente.
2. Viene chiamata qualsiasi parte di un sistema di vettori sottosistema.
1. Se un sistema di vettori include un vettore nullo, allora è linearmente dipendente
2. Se un sistema di vettori ha due vettori uguali allora è linearmente dipendente.
3. Se un sistema di vettori ha due vettori proporzionali, allora è linearmente dipendente.
4. Un sistema di vettori è linearmente dipendente se e solo se almeno uno dei vettori è una combinazione lineare degli altri.
5. Qualsiasi vettore incluso nel lineare sistema indipendente, formano un sottosistema linearmente indipendente.
6. Un sistema di vettori contenente un sottosistema linearmente dipendente è linearmente dipendente.
7. Se un sistema di vettori è linearmente indipendente e dopo avervi aggiunto un vettore risulta essere linearmente dipendente, allora il vettore può essere espanso in vettori e, inoltre, in un modo unico, ad es. i coefficienti di dilatazione si possono trovare in modo univoco.
Base su un piano e nello spazio è detto sistema massimale di vettori linearmente indipendente su un piano o nello spazio (l'aggiunta di un altro vettore al sistema lo rende linearmente dipendente).
Pertanto, una base su un piano è costituita da due vettori qualsiasi non collineari presi in un certo ordine, e una base nello spazio è costituita da tre vettori qualsiasi non complanari presi in un certo ordine.
Sia una base nello spazio, allora, secondo T. 3, qualsiasi vettore dello spazio può essere scomposto in modo unico in vettori base: . I coefficienti di dilatazione sono chiamati coordinate del vettore in base
Scrittura di operazioni lineari sui vettori tramite coordinate:
a) addizione e sottrazione: - base
b) moltiplicazione per il numero R:
Le formule derivano dalle proprietà delle operazioni lineari.
10 Coordinate del vettore rispetto alla base. Orty
Base nello spazio vettoriale libero V3è una qualsiasi terna ordinata di vettori non complanari.
Permettere IN :un 1,un 2,un 3– base fissa in V3.
Coordinate vettore B rispetto alla base IN chiamata tripla ordinata di numeri ( x, y, z), incl. B=X· un 1+sìun 2+z· un 3.
Designazione:b={x, y, z} B Nota: le coordinate di un vettore fisso indicano le coordinate del corrispondente vettore libero.
Teorema1: La corrispondenza tra V 3 e R 3 per una base fissa è biunivoca, cioè B V3 ! {x, y, z) R 3 e ( x, y, z) R3! B V3, incl. b={x, y, z} B
La corrispondenza tra un vettore e le sue coordinate in una data base ha le seguenti proprietà:
1. Permettere b1={x1, y1, z1} B , b2={x2, y2, z2} B b1 + b2 ={x1 + x2 , y1 + y2 , z1 + z2} B
2. Permettere b={x, y, z} B , λRλ b={ λ· X, λ· sì, λ· z} B
3. Lascia b1 || b2, b1 = {x1, y1, z1} B
, b2={x2, y2, z2} B
(Qui: qualsiasi numero).
Vettore unitario, diretto lungo l'asse X, è indicato io, vettore unitario, diretto lungo l'asse Y, è indicato J, UN vettore unitario, diretto lungo l'asse Z, è indicato K. Vettori io, J, K sono chiamati orts– hanno moduli singoli, cioè
io = 1, j = 1, k = 1
11 prodotto scalare di vettori. Angolo tra i vettori. Condizione di ortogonalità vettoriale
Questo è un numero pari al prodotto delle lunghezze di questi vettori e del coseno dell'angolo compreso tra loro.
Prodotto scalare di vettori rispetto alle loro coordinate
Prodotto scalare di vettori X, Y, Z e:
dove è l'angolo tra i vettori e ; se uno dei due, allora
Dalla definizione del prodotto scalare segue che dove, ad esempio, è l'entità della proiezione del vettore sulla direzione del vettore.
Vettore scalare quadrato:
Proprietà del prodotto scalare:
Angolo tra i vettori
Condizioni di ortogonalità vettoriale.
Due vettore aeb ortogonale (perpendicolare), se il loro prodotto scalare è pari a zero a· b= 0
Quindi nel caso di un problema vettoriale piano
a= (a x ;a y )e b= (b x ;b y )
sono ortogonali se a b= a x b x + a y b y = 0
12 prodotto vettoriale di vettori, sue proprietà. Condizione di collinearità dei vettori
Il prodotto vettoriale di un vettore e di un vettore è un vettore indicato da un simbolo e definito dalle seguenti tre condizioni:
1). Il modulo del vettore è uguale a , dove è l'angolo tra i vettori e ;
2). Il vettore è perpendicolare a ciascuno dei vettori e ;
3). La direzione del vettore corrisponde alla “regola della mano destra”. Ciò significa che se i vettori , e vengono portati ad un'origine comune, allora il vettore deve essere diretto come diretto dito medio mano destra, il cui pollice è diretto lungo il primo fattore (cioè lungo il vettore) e l'indice - lungo il secondo (cioè lungo il vettore). Il prodotto vettoriale dipende dall'ordine dei fattori, ovvero: .
Il modulo del prodotto vettoriale è uguale all'area S di un parallelogramma costruito sui vettori e : .
Il prodotto vettoriale stesso può essere espresso dalla formula,
dove è il vettore unitario del prodotto vettoriale.
Il prodotto vettoriale svanisce se e solo se i vettori e sono collineari. In particolare, .
Se il sistema di assi di coordinate è corretto e i vettori e sono specificati in questo sistema dalle loro coordinate:
quindi il prodotto vettoriale di un vettore e un vettore è determinato dalla formula
Un vettore è collineare a un vettore diverso da zero se e solo se le coordinate
i vettori sono proporzionali alle coordinate corrispondenti del vettore, cioè
Le operazioni lineari sui vettori specificati dalle loro coordinate nello spazio vengono eseguite in modo simile.
13 prodotto misto di vettori. Le sue proprietà. Condizione di complanarità dei vettori
Prodotto misto di tre vettori, , è un numero uguale al prodotto scalare di un vettore e un vettore:
Proprietà di un prodotto misto:
3° Tre vettori sono complanari se e solo se
4° Una terna di vettori è giusta se e solo se . Se , allora i vettori , e formano la tripletta sinistra di vettori.
10° identità Jacobi:
Se i vettori , e sono dati dalle loro coordinate, il loro prodotto misto viene calcolato dalla formula
Si chiamano vettori paralleli ad un piano o giacenti sullo stesso piano vettori complanari.
Condizioni di complanarità dei vettori
Tre i vettori sono complanari se il loro prodotto misto è zero.
Tre i vettori sono complanari se sono linearmente dipendenti.
15 diversi tipi di equazioni lineari e piane
Qualsiasi linea retta sul piano può essere specificata da un'equazione del primo ordine
Ascia + Wu + C = 0,
Inoltre le costanti A e B non sono uguali a zero allo stesso tempo. Questa equazione del primo ordine si chiama equazione generale della retta. A seconda dei valori delle costanti A, B e C, sono possibili i seguenti casi particolari:
C = 0, A ≠0, B ≠ 0 – la retta passa per l'origine
A = 0, B ≠0, C ≠0 (By + C = 0) - retta parallela all'asse del Bue
B = 0, A ≠0, C ≠ 0 (Ax + C = 0) – retta parallela all'asse Oy
B = C = 0, A ≠0 – la retta coincide con l'asse Oy
A = C = 0, B ≠0 – la retta coincide con l'asse del Bue
L'equazione di una retta può essere rappresentata in in varie forme a seconda delle condizioni iniziali date.
Mikhail Konstantinovich Diterikhs Mikhail Konstantinovich Diterikhs (17/04/1874-9/10/1937), generale e pubblico russo...

I fagiolini vengono sempre più utilizzati in cucina ogni anno. Si sposa bene con altre verdure. Raccogliere...

Data di pubblicazione: 18/11/18 Le mele sono il frutto più popolare e disponibile quasi tutto l'anno. Le mele sono tradizionali...

Nel 2017, il paese ha registrato un calo demografico. Circa la metà dei decessi sono dovuti a cause cardiovascolari...

SUL. Matsepuro, avvocato Istruzioni per la restituzione delle imposte pagate in eccesso La procedura per la compensazione e la restituzione delle imposte pagate in eccesso...

Circa quarant'anni fa, a San Pietroburgo, sull'isola Vasilievskij, viveva il proprietario di una pensione per uomini. Tra i trenta...

"Metteremo comunque Berezovsky in prigione" quando il suo "tetto del Cremlino" verrà staccato dal tribunale militare della guarnigione di Mosca in...

Se hai sognato dei passi in un sogno, un sogno del genere significa che un evento importante ti aspetta in...

Vuoi preparare anche tu per le feste un'insalata con pesce rosso particolarmente deliziosa? È sempre bellissimo, quindi...

Quando ho iniziato a pensare di andare in Moldavia e ne ho parlato alla mia famiglia, hanno subito iniziato a parlare con...

Fare il gelato in casa è difficile e semplice. È difficile perché è difficile organizzarsi...

Questa ragazza curiosa e talentuosa nacque nel 1899 in una grande famiglia ebrea, i Khazin, che adottò...
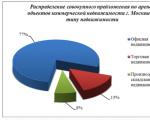
La società RRG ha presentato i risultati di uno studio sul mercato degli immobili commerciali per il 2017. Principali conclusioni,...
Irving Penn () è nato nel New Jersey negli Stati Uniti il 16 giugno 1917. Fin dalla prima infanzia si interessò molto...

I fagiolini vengono sempre più utilizzati in cucina ogni anno. Si sposa bene con altre verdure....

Data di pubblicazione: 18/11/18 Le mele sono il frutto più popolare e disponibile quasi tutto l'anno. Mele...