Il generale Mikhail Diterichs Cavaliere Bianco della Monarchia Russa
Mikhail Konstantinovich Diterikhs Mikhail Konstantinovich Diterikhs (17/04/1874-9/10/1937), generale e pubblico russo...
Come per un punto materiale, ricaveremo un teorema sulla variazione della quantità di moto del sistema in varie forme.
Trasformiamo l'equazione (teorema sul movimento del baricentro di un sistema meccanico)
nel seguente modo:
 ;
;
L'equazione risultante esprime il teorema sulla variazione della quantità di moto di un sistema meccanico in forma differenziale: la derivata della quantità di moto di un sistema meccanico rispetto al tempo è uguale al vettore principale forze esterne, agendo sul sistema .
Nelle proiezioni sugli assi delle coordinate cartesiane:
 ;
;  ;
;  .
.
Prendendo nel tempo gli integrali di entrambi i membri delle ultime equazioni, otteniamo un teorema sulla variazione della quantità di moto di un sistema meccanico in forma integrale: la variazione della quantità di moto di un sistema meccanico è uguale alla quantità di moto del vettore principale di forze esterne che agiscono sul sistema .
![]() .
.
Oppure nelle proiezioni sugli assi delle coordinate cartesiane:
![]() ;
; ![]() ;
; ![]() .
.
Corollari dal teorema (leggi di conservazione della quantità di moto)
La legge di conservazione della quantità di moto si ottiene come casi particolari del teorema sulla variazione della quantità di moto per un sistema in funzione delle caratteristiche del sistema di forze esterne. Le forze interne possono essere qualsiasi, poiché non influenzano i cambiamenti della quantità di moto.
Ci sono due casi possibili:
1. Se somma vettoriale di tutte le forze esterne applicate al sistema è uguale a zero, allora la quantità di movimento del sistema è costante in grandezza e direzione
2. Se la proiezione del vettore principale delle forze esterne su qualsiasi asse di coordinate e/o e/o è uguale a zero, allora la proiezione della quantità di moto su questi stessi assi è un valore costante, cioè e/o e/o rispettivamente.
È possibile effettuare voci simili per un punto materiale e per un punto materiale.
L'obiettivo. Da una pistola la cui massa M, un proiettile di massa vola via in direzione orizzontale M con velocità v. Trova la velocità V armi dopo aver sparato.
Soluzione. Tutte le forze esterne che agiscono sul sistema meccanico arma-proiettile sono verticali. Ciò significa che, in base al corollario del teorema sulla variazione della quantità di moto del sistema, abbiamo: .
La quantità di movimento del sistema meccanico prima dello sparo:
La quantità di movimento del sistema meccanico dopo lo sparo:
![]() .
.
Uguagliando i membri destri delle espressioni, otteniamo che
 .
.
Il segno "-" nella formula risultante indica che dopo aver sparato la pistola rotolerà indietro nella direzione opposta all'asse Bue.
ESEMPIO 2. Un flusso di liquido con densità scorre ad una velocità V da un tubo con area di sezione trasversale F e colpisce una parete verticale ad angolo. Determinare la pressione del fluido sulla parete.
SOLUZIONE. Applichiamo il teorema sulla variazione della quantità di moto in forma integrale a un volume di liquido con una massa M colpire un muro per un periodo di tempo T.

EQUAZIONE DI MESHCHERSKY
(equazione base della dinamica di un corpo di massa variabile)
Nella tecnologia moderna si verificano casi in cui la massa di un punto e di un sistema non rimane costante durante il movimento, ma cambia. Quindi, ad esempio, durante il volo dei razzi spaziali, a causa dell'espulsione dei prodotti della combustione e di singole parti non necessarie dei razzi, la variazione di massa raggiunge il 90-95% del valore iniziale totale. Ma non solo la tecnologia spaziale può essere un esempio della dinamica del movimento di massa variabile. Nell'industria tessile si verificano cambiamenti significativi nella massa di vari fusi, bobine e rotoli alle moderne velocità operative di macchine e macchinari.
Consideriamo le caratteristiche principali associate ai cambiamenti di massa, utilizzando l'esempio movimento in avanti corpi di massa variabile. La legge fondamentale della dinamica non può essere applicata direttamente ad un corpo di massa variabile. Si ottengono quindi equazioni differenziali del moto di un punto di massa variabile, applicando il teorema sulla variazione della quantità di moto del sistema.
Lascia che il punto abbia massa m+DM si muove a velocità. Quindi una certa particella con una massa viene separata dal punto dm muovendosi a velocità.
La quantità di movimento del corpo prima che la particella si stacchi:
La quantità di movimento di un sistema costituito da un corpo e una particella staccata dopo la sua separazione:
Quindi il cambiamento di slancio:
Per il teorema sulla variazione della quantità di moto del sistema:

Indichiamo la quantità - la velocità relativa della particella:

Denotiamo 
Misurare R chiamata forza reattiva. La forza reattiva è la spinta del motore causata dall'espulsione del gas dall'ugello.
Finalmente otteniamo
![]() -
-
Questa formula esprime l'equazione base della dinamica di un corpo di massa variabile (formula di Meshchersky). Dall'ultima formula segue che le equazioni differenziali del moto di un punto di massa variabile hanno la stessa forma di un punto di massa costante, fatta eccezione per la forza reattiva aggiuntiva applicata al punto dovuta alla variazione di massa.
L'equazione fondamentale per la dinamica di un corpo di massa variabile indica che l'accelerazione di questo corpo si forma non solo a causa delle forze esterne, ma anche a causa della forza reattiva.
La forza reattiva è una forza simile a quella percepita da una persona che spara: quando si spara con una pistola, viene percepita dalla mano; Quando si spara con un fucile, viene percepito dalla spalla.
La prima formula di Tsiolkovsky (per un razzo a stadio singolo)
Lasciamo che un punto di massa variabile o un razzo si muovano in linea retta sotto l'influenza di una sola forza reattiva. Poiché per molti moderni motori a reazione ![]() , dove è la forza reattiva massima consentita dalla progettazione del motore (spinta del motore); - la forza di gravità agente sul motore situato sulla superficie terrestre. Quelli. quanto sopra ci consente di trascurare la componente nell'equazione di Meshchersky e di accettare questa equazione nella forma per ulteriori analisi: ,
, dove è la forza reattiva massima consentita dalla progettazione del motore (spinta del motore); - la forza di gravità agente sul motore situato sulla superficie terrestre. Quelli. quanto sopra ci consente di trascurare la componente nell'equazione di Meshchersky e di accettare questa equazione nella forma per ulteriori analisi: ,
Indichiamo:
Riserva di carburante (per i motori a reazione liquida - la massa secca del razzo (la sua massa rimanente dopo aver bruciato tutto il carburante);
La massa di particelle separate dal razzo; è considerato come un valore variabile, che varia da a .
Scriviamo l'equazione del moto rettilineo di un punto di massa variabile nella forma seguente:
 .
.
Poiché la formula per determinare la massa variabile di un razzo è
Pertanto le equazioni del moto di un punto  Prendendo gli integrali di entrambi i membri otteniamo
Prendendo gli integrali di entrambi i membri otteniamo
Dove - velocità caratteristica- questa è la velocità che un razzo acquisisce sotto l'influenza della spinta dopo che tutte le particelle sono state espulse dal razzo (per i motori a reazione liquida - dopo che tutto il carburante si è esaurito).
Al di fuori del segno integrale (cosa che si può fare sulla base del teorema del valore medio noto dalla matematica superiore) si trova la velocità media delle particelle espulse dal razzo.

Equazione differenziale del moto di un punto materiale sotto l'influenza di una forza F può essere rappresentato nella seguente forma vettoriale:
Dalla massa di un punto M viene accettato come costante, può essere inserito sotto il segno della derivata. Poi
La formula (1) esprime il teorema sulla variazione della quantità di moto di un punto in forma differenziale: la derivata prima rispetto al tempo della quantità di moto di un punto è uguale alla forza agente sul punto.
Nelle proiezioni sugli assi delle coordinate (1) può essere rappresentato come
Se entrambi i lati (1) vengono moltiplicati per dt, quindi otteniamo un'altra forma dello stesso teorema: il teorema della quantità di moto in forma differenziale:
quelli. la differenza della quantità di moto di un punto è uguale all'impulso elementare della forza agente sul punto.
Proiettando entrambe le parti della (2) sugli assi coordinati, otteniamo
Integrando entrambe le parti di (2) da zero a t (Fig. 1), abbiamo
dov'è la velocità del punto in questo momento T; - velocità a T = 0;
S- impulso di forza nel tempo T.
Un'espressione nella forma (3) è spesso chiamata teorema della quantità di moto in forma finita (o integrale): la variazione della quantità di moto di un punto in un qualsiasi periodo di tempo è uguale all'impulso della forza nello stesso periodo di tempo.
Nelle proiezioni sugli assi coordinati, questo teorema può essere rappresentato nella forma seguente:
Per un punto materiale, il teorema sulla variazione della quantità di moto in qualsiasi forma non è essenzialmente diverso dalle equazioni differenziali del moto di un punto.
Teorema sulla variazione della quantità di moto di un sistema
La quantità di moto del sistema sarà chiamata quantità vettoriale Q, pari alla somma geometrica (vettore principale) delle quantità di moto di tutti i punti del sistema.
Consideriamo un sistema composto da N punti materiali. Componiamo le equazioni differenziali del moto per questo sistema e aggiungiamole termine per termine. Quindi otteniamo:
Ultimo importo per immobile forze interne uguale a zero. Oltretutto,
Infine troviamo:
L’equazione (4) esprime il teorema sulla variazione della quantità di moto del sistema in forma differenziale: la derivata temporale della quantità di moto del sistema è uguale alla somma geometrica di tutte le forze esterne che agiscono sul sistema.
Troviamo un'altra espressione per il teorema. Lascia entrare il momento T= 0 è la quantità di movimento del sistema Q0, e al momento t1 diventa uguale Domanda 1. Quindi, moltiplicando entrambi i lati dell'uguaglianza (4) per dt e integrando otteniamo:
O dove:
(Impulso della forza S)
poiché gli integrali a destra danno impulsi di forze esterne,
l’equazione (5) esprime il teorema sulla variazione della quantità di moto del sistema in forma integrale: la variazione della quantità di moto del sistema in un certo periodo di tempo è uguale alla somma degli impulsi delle forze esterne che agiscono sul sistema nello stesso periodo di tempo.
Nelle proiezioni sugli assi coordinati avremo:
Legge di conservazione della quantità di moto
Dal teorema sulla variazione della quantità di moto di un sistema si possono ricavare i seguenti importanti corollari:
1. Lascia che la somma di tutte le forze esterne che agiscono sul sistema sia uguale a zero:
Quindi dall'equazione (4) ne consegue che in questo caso Q = cost.
Così, se la somma di tutte le forze esterne che agiscono sul sistema è uguale a zero, allora il vettore della quantità di moto del sistema sarà costante in grandezza e direzione.
2. 01Siano le forze esterne che agiscono sul sistema tali che la somma delle loro proiezioni su qualche asse (ad esempio Bue) sia uguale a zero:
Quindi dalle equazioni (4`) ne consegue che in questo caso Q = cost.
Così, se la somma delle proiezioni di tutte le forze esterne agenti su qualsiasi asse è uguale a zero, allora la proiezione della quantità di movimento del sistema su questo asse è un valore costante.
Questi risultati esprimono legge di conservazione della quantità di moto di un sistema. Ne consegue che le forze interne non possono modificare la quantità totale di movimento del sistema.
Diamo un'occhiata ad alcuni esempi:
· Fenomeno relativo al ritorno del rotolo. Se consideriamo il fucile e il proiettile come un unico sistema, la pressione dei gas in polvere durante uno sparo sarà una forza interna. Questa forza non può modificare la quantità di moto totale del sistema. Ma poiché i gas in polvere, agendo sul proiettile, gli impartiscono una certa quantità di movimento diretto in avanti, devono contemporaneamente impartire al fucile la stessa quantità di movimento nella direzione opposta. Ciò farà sì che il fucile si muova all'indietro, ad es. il cosiddetto ritorno. Un fenomeno simile si verifica quando si spara con una pistola (rollback).
· Funzionamento dell'elica (elica). L'elica imprime movimento ad una certa massa d'aria (o acqua) lungo l'asse dell'elica, respingendo questa massa. Se consideriamo la massa lanciata e l'aereo (o la nave) come un unico sistema, allora le forze di interazione tra l'elica e l'ambiente, come quelle interne, non possono modificare la quantità totale di movimento di questo sistema. Pertanto, quando una massa d'aria (acqua) viene respinta, l'aereo (o la nave) riceve una corrispondente velocità di avanzamento tale che totale del moto del sistema considerato rimane uguale a zero, poiché era zero prima dell'inizio del moto.
Un effetto simile si ottiene mediante l'azione di remi o ruote a pale.
· Propulsione ricettiva In un razzo (razzo), i prodotti gassosi della combustione del carburante vengono espulsi ad alta velocità dal foro nella coda del razzo (dall'ugello del motore a reazione). Le forze di pressione che agiscono in questo caso saranno forze interne e non possono modificare la quantità di moto totale del sistema di gas della polvere missilistica. Ma poiché i gas in fuga hanno un certo movimento diretto all'indietro, il razzo riceve una corrispondente velocità in avanti.
Teorema dei momenti attorno ad un asse.
Consideriamo il punto di massa materiale M, muovendosi sotto l'influenza della forza F. Troviamo per esso la relazione tra il momento dei vettori mV E F rispetto ad un asse Z fisso.
m z (F) = xF - yF (7)
Allo stesso modo per il valore m(mV), se tolto M sarà fuori parentesi
M z(mV) = m(xV - yV)(7`)
Prendendo le derivate rispetto al tempo da entrambi i lati di questa uguaglianza, troviamo
Sul lato destro dell'espressione risultante, la prima parentesi è uguale a 0, poiché dx/dt=V e dу/dt = V, la seconda parentesi secondo la formula (7) è uguale a
mz(F), poiché secondo la legge fondamentale della dinamica:
Infine avremo (8)
L'equazione risultante esprime il teorema dei momenti attorno all'asse: la derivata temporale del momento della quantità di moto di un punto rispetto a qualsiasi asse è uguale al momento della forza agente rispetto allo stesso asse. Un teorema simile vale per momenti attorno a qualsiasi centro O.
Per un punto materiale, la legge fondamentale della dinamica può essere rappresentata come
Moltiplicando vettorialmente entrambi i lati di questa relazione a sinistra per il raggio vettore (Fig. 3.9), otteniamo
![]() (3.32)
(3.32)
Sul lato destro di questa formula abbiamo il momento della forza relativo al punto O. Trasformiamo il lato sinistro applicando la formula per la derivata di un prodotto vettoriale
Ma ![]() Come prodotto vettoriale vettori paralleli. Dopo questo otteniamo
Come prodotto vettoriale vettori paralleli. Dopo questo otteniamo
![]() (3.33)
(3.33)
La derivata prima rispetto al tempo del momento della quantità di moto di un punto rispetto a un qualsiasi centro è uguale al momento della forza rispetto allo stesso centro.
 |
Figura 3.12
; ; ![]()
Per dati di input, il momento angolare del sistema
![]()
Teorema sulla variazione del momento angolare di un sistema. Applichiamo le forze esterne ed interne risultanti a ciascun punto del sistema. Per ogni punto del sistema si può applicare il teorema sulla variazione del momento angolare, ad esempio nella forma (3.33)
Sommando su tutti i punti del sistema e tenendo conto che la somma delle derivate è uguale alla derivata della somma, otteniamo
Determinando il momento cinetico del sistema e le proprietà delle forze esterne ed interne
Pertanto, la relazione risultante può essere rappresentata come
La derivata prima temporale del momento angolare di un sistema rispetto a un punto qualsiasi è uguale al momento principale delle forze esterne agenti sul sistema rispetto allo stesso punto.
3.3.5. Lavoro di forza
1) Il lavoro elementare di una forza è pari al prodotto scalare della forza per il raggio differenziale del vettore del punto di applicazione della forza (Fig. 3.13)

Figura 3.13
L'espressione (3.36) può essere scritta anche nelle seguenti forme equivalenti
dove è la proiezione della forza nella direzione della velocità del punto di applicazione della forza.
2) Lavoro della forza sullo spostamento finale
Integrando il lavoro elementare della forza, otteniamo le seguenti espressioni per il lavoro della forza sullo spostamento finale dal punto A al punto B
3) Lavoro di forza costante
Se la forza è costante, ne consegue dalla (3.38).
Il lavoro di una forza costante non dipende dalla forma della traiettoria, ma dipende solo dal vettore spostamento del punto di applicazione della forza.
4) Lavoro della forza peso
Per la forza peso (Fig. 3.14) e dalla (3.39) otteniamo

Figura 3.14
Se il movimento avviene dal punto B al punto A, allora
Generalmente
Il segno “+” corrisponde al movimento verso il basso del punto di applicazione della forza, il segno “-” verso l'alto.
4) Lavoro della forza elastica
Lasciamo che l'asse della molla sia diretto lungo l'asse x (Fig. 3.15), e l'estremità della molla si muova dal punto 1 al punto 2, quindi da (3.38) otteniamo ![]()
Se la rigidità della molla lo è Con, allora
UN ![]() (3.41)
(3.41)
Se l'estremità della molla si sposta dal punto 0 al punto 1, in questa espressione sostituiamo , , quindi il lavoro della forza elastica assumerà la forma
![]() (3.42)
(3.42)
dov'è l'allungamento della molla.
Figura 3.15
5) Il lavoro della forza applicata ad un corpo rotante. Il lavoro del momento.
Nella fig. La Figura 3.16 mostra un corpo rotante al quale viene applicata una forza arbitraria. Durante la rotazione, il punto di applicazione di questa forza si muove in un cerchio.
Il sistema discusso nel teorema può essere qualsiasi sistema meccanico costituito da qualsiasi corpo.
Enunciato del teorema
La quantità di movimento (impulsi) di un sistema meccanico è una quantità pari alla somma delle quantità di movimento (impulsi) di tutti i corpi inclusi nel sistema. L'impulso delle forze esterne che agiscono sui corpi del sistema è la somma degli impulsi di tutte le forze esterne che agiscono sui corpi del sistema.
( kg m/s)
Afferma il teorema sulla variazione della quantità di moto di un sistema
La variazione della quantità di moto del sistema in un certo periodo di tempo è uguale all'impulso delle forze esterne che agiscono sul sistema nello stesso periodo di tempo.
Legge di conservazione della quantità di moto di un sistema
Se la somma di tutte le forze esterne che agiscono sul sistema è zero, allora la quantità di moto (momento) del sistema è una quantità costante.
![]() ,
otteniamo l'espressione del teorema sulla variazione della quantità di moto del sistema in forma differenziale:
,
otteniamo l'espressione del teorema sulla variazione della quantità di moto del sistema in forma differenziale:
Avendo integrato entrambi i lati dell'uguaglianza risultante in un periodo di tempo arbitrariamente preso tra alcuni e , otteniamo l’espressione del teorema sulla variazione della quantità di moto del sistema in forma integrale:

Legge di conservazione della quantità di moto (Legge di conservazione della quantità di moto) afferma che la somma vettoriale degli impulsi di tutti i corpi del sistema è un valore costante se la somma vettoriale delle forze esterne agenti sul sistema è pari a zero.
(momento della quantità di moto m 2 kg s −1)
Teorema sulla variazione del momento angolare rispetto al centro
la derivata temporale del momento della quantità di moto (momento cinetico) di un punto materiale rispetto a un qualsiasi centro fisso è uguale al momento della forza agente sul punto rispetto allo stesso centro.
non so 0 /dt = M 0 (F ) .
Teorema sulla variazione del momento angolare rispetto ad un asse
la derivata temporale del momento della quantità di moto (momento cinetico) di un punto materiale rispetto a qualsiasi asse fisso è uguale al momento della forza che agisce su questo punto rispetto allo stesso asse.
non so X /dt = M X (F ); non so sì /dt = M sì (F ); non so z /dt = M z (F ) .
Considera un punto materiale M massa M , muovendosi sotto l'influenza della forza F (Figura 3.1). Scriviamo e costruiamo il vettore del momento angolare (momento cinetico) M 0 punto materiale rispetto al centro O :
![]()

Differenziamo l'espressione del momento angolare (momento cinetico K 0) in base all'ora:
![]()
Perché dottor /dt = V , quindi il prodotto vettoriale V ⊗ M ⋅ V (vettori collineari V E M ⋅ V ) è uguale a zero. Allo stesso tempo d(m ⋅ V) /dt = F secondo il teorema sulla quantità di moto di un punto materiale. Quindi lo capiamo
non so 0 /dt = R ⊗F , (3.3)
Dove R ⊗F = M 0 (F ) – vettore momento della forza F rispetto ad un centro fisso O . Vettore K 0 ⊥ piano ( R , M ⊗V ) e il vettore M 0 (F ) ⊥ aereo ( R ,F ), finalmente abbiamo
non so 0 /dt = M 0 (F ) . (3.4)
L'equazione (3.4) esprime il teorema sulla variazione del momento angolare (momento angolare) di un punto materiale rispetto al centro: la derivata temporale del momento della quantità di moto (momento cinetico) di un punto materiale rispetto a un qualsiasi centro fisso è uguale al momento della forza agente sul punto rispetto allo stesso centro.
Proiettando l'uguaglianza (3.4) sugli assi delle coordinate cartesiane, si ottiene
non so X /dt = M X (F ); non so sì /dt = M sì (F ); non so z /dt = M z (F ) . (3.5)
Le uguaglianze (3.5) esprimono il teorema sulla variazione del momento angolare (momento cinetico) di un punto materiale rispetto all'asse: la derivata temporale del momento della quantità di moto (momento cinetico) di un punto materiale rispetto a qualsiasi asse fisso è uguale al momento della forza che agisce su questo punto rispetto allo stesso asse.
Consideriamo le conseguenze derivanti dai Teoremi (3.4) e (3.5).
Corollario 1. Consideriamo il caso in cui la forza F durante l'intero movimento il punto passa per il centro stazionario O (caso di forza centrale), cioè Quando M 0 (F ) = 0. Allora dal Teorema (3.4) segue che K 0 = cost ,
quelli. nel caso di una forza centrale, il momento angolare (momento cinetico) di un punto materiale rispetto al centro di questa forza rimane costante in grandezza e direzione (Figura 3.2).

Figura 3.2
Dalla condizione K 0 = cost ne consegue che la traiettoria di un punto in movimento è una curva piana, il cui piano passa per il centro di questa forza.
Corollario 2. Permettere M z (F ) = 0, cioè la forza attraversa l'asse z o parallelo ad esso. In questo caso, come si può vedere dalla terza delle equazioni (3.5), K z = cost ,
quelli. se il momento della forza che agisce su un punto rispetto a un qualsiasi asse fisso è sempre uguale a zero, allora il momento angolare (momento angolare) del punto rispetto a questo asse rimane costante.
Dimostrazione del teorema sulla variazione della quantità di moto
Supponiamo che il sistema sia costituito da punti materiali con masse e accelerazioni. Dividiamo tutte le forze che agiscono sui corpi del sistema in due tipi:
Le forze esterne sono forze che agiscono da corpi non inclusi nel sistema in esame. La risultante delle forze esterne che agiscono su un punto materiale con numero io indichiamo
Le forze interne sono le forze con cui interagiscono tra loro i corpi del sistema stesso. La forza con cui si arriva al punto con il numero io il punto con il numero è valido K, denoteremo , e la forza di influenza io punto in poi K esimo punto - . Ovviamente, quando, allora
Usando la notazione introdotta, scriviamo la seconda legge di Newton per ciascuno dei punti materiali considerati nella forma
![]()
Considerando che ![]() e sommando tutte le equazioni della seconda legge di Newton, otteniamo:
e sommando tutte le equazioni della seconda legge di Newton, otteniamo:

L'espressione rappresenta la somma di tutte le forze interne che agiscono nel sistema. Secondo la terza legge di Newton, in questa somma, ad ogni forza corrisponde una forza tale che, quindi, vale ![]() Poiché l'intera somma è costituita da tali coppie, la somma stessa è zero. Quindi possiamo scrivere
Poiché l'intera somma è costituita da tali coppie, la somma stessa è zero. Quindi possiamo scrivere

Usando la notazione per la quantità di moto del sistema, otteniamo

Introducendo in considerazione la variazione della quantità di moto delle forze esterne ![]() , otteniamo l’espressione del teorema sulla variazione della quantità di moto del sistema in forma differenziale:
, otteniamo l’espressione del teorema sulla variazione della quantità di moto del sistema in forma differenziale:
Pertanto, ciascuna delle ultime equazioni ottenute ci consente di affermare: un cambiamento nella quantità di moto del sistema avviene solo come risultato dell'azione di forze esterne e le forze interne non possono avere alcuna influenza su questo valore.
Avendo integrato entrambi i lati dell'uguaglianza risultante su un intervallo di tempo arbitrariamente scelto tra alcuni e , otteniamo l'espressione del teorema sulla variazione della quantità di moto del sistema in forma integrale:
dove e sono i valori della quantità di movimento del sistema in alcuni istanti di tempo e, rispettivamente, e è l'impulso delle forze esterne in un periodo di tempo. In accordo con quanto detto in precedenza e con le notazioni introdotte,

Consideriamo un sistema costituito da punti materiali. Componiamo le equazioni differenziali del moto (13) per questo sistema e aggiungiamole termine per termine. Allora otteniamo
L'ultima somma, per la proprietà delle forze interne, è pari a zero. Oltretutto,
![]()
Finalmente troviamo
![]()
L'equazione (20) esprime il teorema sulla variazione della quantità di moto del sistema in forma differenziale: la derivata temporale della quantità di moto del sistema è uguale alla somma geometrica di tutte le forze esterne che agiscono sul sistema. Nelle proiezioni sugli assi coordinati ci saranno:
Troviamo un'altra espressione per il teorema. Lascia che al momento la quantità di movimento del sistema sia uguale e al momento diventi uguale a . Quindi, moltiplicando entrambi i membri dell'uguaglianza (20) per e integrando, otteniamo

![]()
poiché gli integrali a destra danno impulsi di forze esterne.
L'equazione (21) esprime il teorema sulla variazione della quantità di moto del sistema in forma integrale: la variazione della quantità di moto del sistema in un certo periodo di tempo è uguale alla somma degli impulsi che agiscono sul sistema di forze esterne su lo stesso periodo di tempo.
Nelle proiezioni sugli assi coordinati ci saranno:
Segnaliamo la connessione tra il teorema dimostrato e il teorema sul moto del centro di massa. Poiché , quindi, sostituendo questo valore nell'uguaglianza (20) e tenendo conto che otteniamo , cioè l'equazione (16).
Di conseguenza il teorema sul moto del centro di massa e il teorema sulla variazione della quantità di moto del sistema sono essenzialmente due forme diverse lo stesso teorema. Nei casi in cui viene studiato il movimento di un corpo rigido (o di un sistema di corpi), qualsiasi di queste forme può essere utilizzata allo stesso modo e l'equazione (16) è solitamente più conveniente da usare. Per un mezzo continuo (liquido, gas), quando si risolvono i problemi, di solito si usa il teorema sulla variazione della quantità di moto del sistema. Questo teorema ha importanti applicazioni anche nella teoria dell'impatto (vedi Capitolo XXXI) e nello studio della propulsione a reazione (vedi § 114).
Mikhail Konstantinovich Diterikhs Mikhail Konstantinovich Diterikhs (17/04/1874-9/10/1937), generale e pubblico russo...

I fagiolini sono sempre più utilizzati in cucina ogni anno. Si sposa bene con altre verdure. Raccogliere...

Data di pubblicazione: 18/11/18 Le mele sono il frutto più popolare e disponibile quasi tutto l'anno. Le mele sono tradizionali...

Nel 2017, il paese ha registrato un calo demografico. Circa la metà dei decessi sono dovuti a cause cardiovascolari...

SUL. Matsepuro, avvocato Istruzioni per la restituzione delle imposte pagate in eccesso La procedura per la compensazione e la restituzione delle imposte pagate in eccesso...

Circa quarant'anni fa, a San Pietroburgo, sull'isola Vasilievskij, viveva il proprietario di una pensione per uomini. Tra i trenta...

"Metteremo comunque Berezovsky in prigione" quando il suo "tetto del Cremlino" verrà staccato dal tribunale militare della guarnigione di Mosca in...

Se hai sognato dei passi in un sogno, un sogno del genere significa che un evento importante ti aspetta in...

Vuoi preparare anche tu per le feste un'insalata con pesce rosso particolarmente deliziosa? È sempre bellissimo, quindi...

Quando ho iniziato a pensare di andare in Moldavia e ne ho parlato alla mia famiglia, hanno subito iniziato a parlare con...

Fare il gelato in casa è difficile e semplice. È difficile perché è difficile organizzarsi...

Questa ragazza curiosa e talentuosa nacque nel 1899 in una grande famiglia ebrea, i Khazin, che adottò...
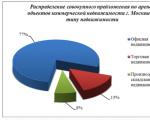
La società RRG ha presentato i risultati di uno studio sul mercato degli immobili commerciali per il 2017. Principali conclusioni,...
Irving Penn () è nato nel New Jersey negli Stati Uniti il 16 giugno 1917. Fin dalla prima infanzia si interessò molto...

I fagiolini sono sempre più utilizzati in cucina ogni anno. Si sposa bene con altre verdure....

Data di pubblicazione: 18/11/18 Le mele sono il frutto più popolare e disponibile quasi tutto l'anno. Mele...